Driver for the Logimat SLL#
The Logimat SLL Shark Control Module is designed for the controlling the SLL Logimat generation, using the NGKP communication protocol. It supports the following features of the Logimat:
- Basic functionality as retrieve and return trays.
- Controlling the picking lightpointer.
- Manage the picking height.
- Tilt of selected trays (LogiTilt).
- Prefetch of trays (LogiDual).
- Tray extraction (LogiDrive)
- Multiple openings.
- LogiBar.
Configuration#
Network#
The Logimats are delivered with a router that isolates the Logimat PLC and PC in a local network, separated from the LAN. One or more Logimats may share the same router. SHARK can be configured in two different ways facilitating this configuration.
SHARK is controlling the Logimat from the built-in PC.#
This is the standard configuration and the only configuration that is supported by the Cloud solution.
block-beta
columns 3
block:group1:3 style group1 fill:lightgrey;
columns 3
PLC["Logimat<br>PLC<br>192.162.80.5"] space PC["Windows_PC<br>SHARK<br>192.162.80.8"]
space:3
text1["Private Logimat<br>network"] Router["Router/Firewall<br>192.162.80.1<br>LAN IP"] space
style text1 stroke:lightgrey,fill:lightgrey,color:black;
style PLC fill:lightsteelblue;
style PC fill:lightsteelblue;
style Router fill:lightsteelblue;
end
block:group2:3 style group2 fill:lightgrey;
columns 3
space:3
space:3
text2["Local Network"] WAN_ROUTER["WAN Router<br>"] space
style text2 stroke:lightgrey,fill:lightgrey,color:black;
style WAN_ROUTER fill:lightsteelblue;
end
block:group3:3 style group3 fill:lightgrey;
columns 3
space:3
space SHARK_SERVER["SHARK Cloud<br>Servers"] space
text3["Cloud Service"] space:2
style SHARK_SERVER fill:lightsteelblue
style text3 stroke:lightgrey,fill:lightgrey,color:black;
end
PC -- "Server https://sharkwms.com" --> Router
PC -- "TCP/IP commmands" --> PLC
Router -- "Server https://sharkwms.com" --> WAN_ROUTER
WAN_ROUTER -- "Server https://sharkwms.com" --> SHARK_SERVERSHARK is controlling the Logimat from the built-in PC - Router is bypassed.#
This is very similar to the standard setup, but the here the router/firewall is not connected to the LAN, but instead the LAN is connected to the second network interface on the SHARK PC.
block-beta
columns 3
block:group1:3 style group1 fill:lightgrey;
columns 3
PLC["Logimat<br>PLC<br>192.162.80.5"] space PC["Windows_PC<br>SHARK<br>192.162.80.8"]
space:3
text1["Private Logimat<br>network"] Router["Router/Firewall<br>192.162.80.1<br>LAN IP"] space
style text1 stroke:lightgrey,fill:lightgrey,color:black;
style PLC fill:lightsteelblue;
style PC fill:lightsteelblue;
style Router fill:lightsteelblue;
end
block:group2:3 style group2 fill:lightgrey;
columns 3
space:3
space:3
text2["Local Network"] WAN_ROUTER["WAN Router<br>"] space
style text2 stroke:lightgrey,fill:lightgrey,color:black;
style WAN_ROUTER fill:lightsteelblue;
end
block:group3:3 style group3 fill:lightgrey;
columns 3
space:3
space SHARK_SERVER["SHARK Cloud<br>Servers"] space
text3["Cloud Service"] space:2
style SHARK_SERVER fill:lightsteelblue
style text3 stroke:lightgrey,fill:lightgrey,color:black;
end
PC -- "Server https://sharkwms.com" --> WAN_ROUTER
PC -- "TCP/IP commmands" --> PLC
WAN_ROUTER -- "Server https://sharkwms.com" --> SHARK_SERVERSHARK is controlling the Logimats from the SHARK server.
This is a special configuration and only supported by on-premise installations. The firewall must be configured to allow communication between the SHARK server and the Logimat PLC. The advantages with this setup is that machine control is centralized and the Logimat can be controlled from any SHARK client.
block-beta
columns 3
block:group1:3 style group1 fill:lightgrey;
columns 3
PLC["Logimat<br>PLC<br>192.162.80.5"] space PC["Windows_PC<br>SHARK<br>192.162.80.8"]
space:3
text1["Private Logimat<br>network"] Router["Router/Firewall<br>192.162.80.1<br>LAN IP"] space
style text1 stroke:lightgrey,fill:lightgrey,color:black;
style PLC fill:lightsteelblue;
style PC fill:lightsteelblue;
style Router fill:lightsteelblue;
end
block:group2:3 style group2 fill:lightgrey;
columns 3
space:3
space:3
text2["Local Network"] space space
style text2 stroke:lightgrey,fill:lightgrey,color:black;
end
block:group3:3 style group3 fill:lightgrey;
columns 3
space:3
space SHARK_SERVER space
text3["Cloud Service"] space:2
style SHARK_SERVER fill:lightsteelblue
style text3 stroke:lightgrey,fill:lightgrey,color:black;
end
PC -- "Server https://sharkwms.com" --> Router
Router -- "Server https://sharkwms.com" --> SHARK_SERVER
SHARK_SERVER -- "Server https://sharkwms.com" --> Router
Router -- "Server TCP Socket<br>to PLC" --> PLC
Logimat PLC Configuration#
To make changes here, you must be logged in as SSITechnician.
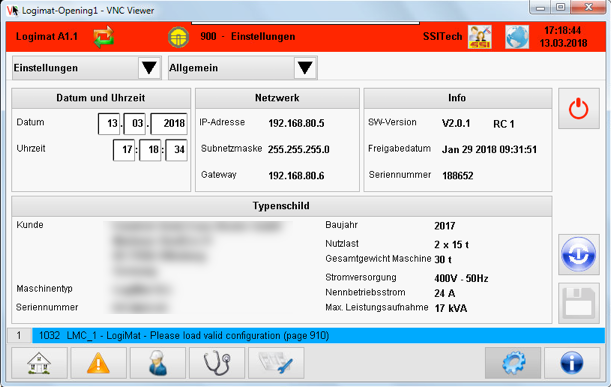
The version of the PLC can be found here:
LogiDriver#
Open the LogiDriver Parameter menu. The menu depends on the PLC version
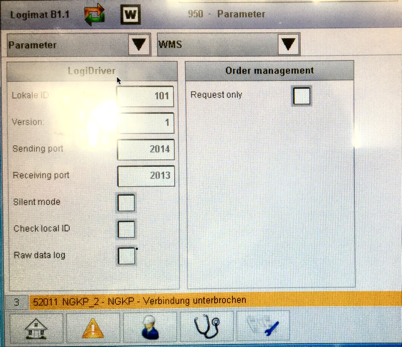
This is how the LogiDriver must be configured PLC version before 2.0.
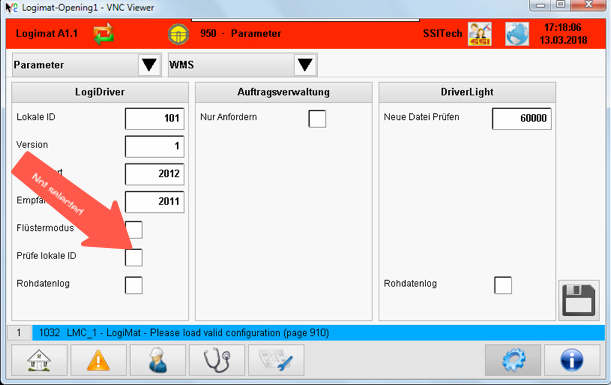
This is how the LogiDriver must be configured PLC version after 2.0.
Be sure that:
Check Local ID : Disabled
Check Configuration#
From the PLC "Visualization" (VNC viewer), the PLC configuration can be checked:
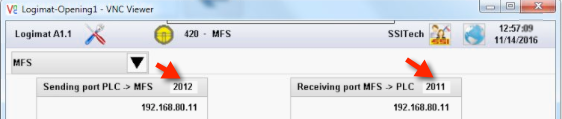
The receiver and sender port must be configured in LogiSoft as well.
Step 1 – Check the Logimat is connected to the LAN#
Before starting the configuration, check the following:
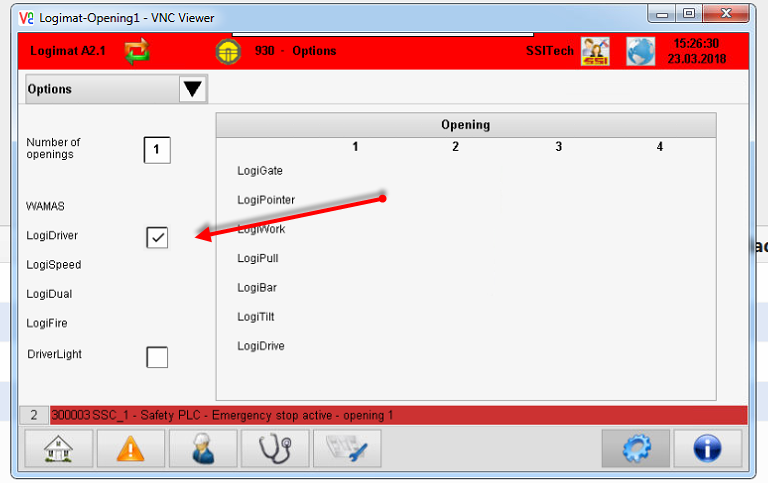
- The Logimat must have the LogiDriver option.
- A LAN cable must be connected to the router in the Logimat PLC enclosure.
Step 2 – Logimat PC Configuration#
The Logimat PC should already be configured. The standard configuration looks like (Connection 2) :

Step 3 - Configuration of the Logimat Router (firewall)#
The router is expected to be configured with the default SSI setup as described in the document “Firewallkonfiguration Weidmüller IE-SR-2GT-UMTS/3G”. If this is done the router can be reached at http://192.168.80.1 on the LAN side.
The login to the router is:
| Login | admin |
| Password | \<password> |
The only change made here, is that the WAN IP configuration is changed to DHCP. The router can also be configured with static IP and more security if required.
Set the WAN IP configuration to DHCP.
Step 3A - Configuration of the Logimat Router with server installed#
Shark Control
If the control of the Logimat is done from an external server and not from the client running on the Logimat PC, two ports have to be forwarded through the router.
- Create two forward rules from the router WAN address to the PLC for port 2011 and 2012 (or whatever the PLC is configured to use). If the rule already exist, modify the existing rule.
- Setup a packet filter from the external server allowing port 2011 and 2012 to be forwarded (still 2011 and 2012 depends on the PLC configuration).
- Restart the Router after configuration.
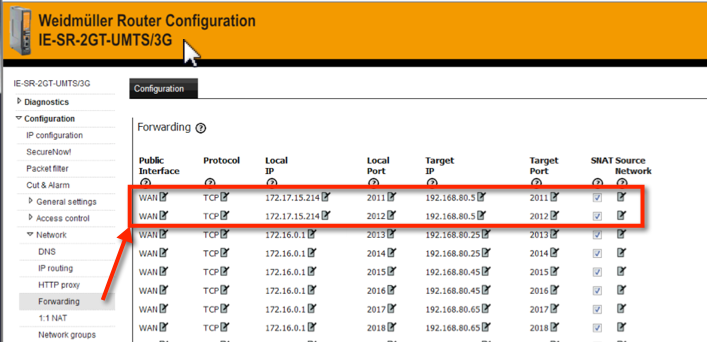
Configuration of port forwarding.
Local IP is the server you are connection from
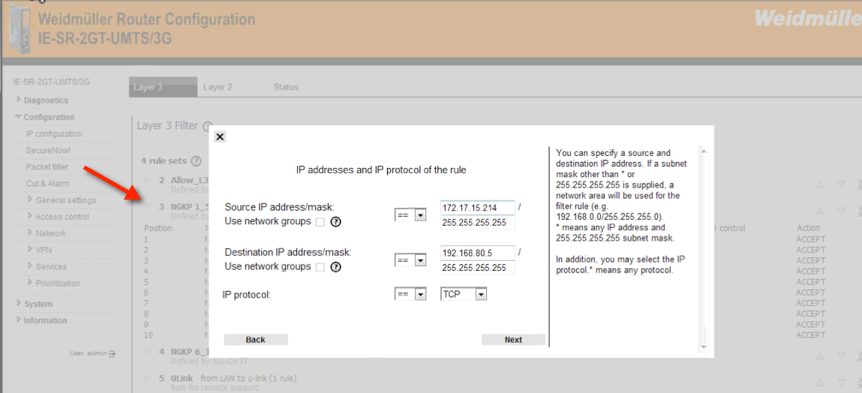
Configuration of the Packet Filter.
Step 4 – Installing the LogiSoft Client#
After the router is configured, the LogiSoft client can be installed from the application server. This is done the usual way from the web server:
http://\<logisoft server>:8086
Step 5 – Configuration in LogiSoft#
When LogiSoft is installed and started, open the configuration menu to define the new module:
Press “Config” in the Module Setup pane, to configure the Logimat.
Typical there will be nothing to configure, just press “OK” to confirm. The IP address and other settings is typical the same for all machines.
| Parameter | Default Values | Description |
|---|---|---|
| Sender Port | 2021 | This is the PLC NGKP sender port for the PLC. |
| Receiver Port | 2022 | This is the PLC NGKP receiver port for the PLC. |
| IP Address | 192.168.80.5 | The IP address of the PLC. |
| Sender ID | 201 | NGKP sender ID |
| Receiver ID | 101 | NGKP receiver ID |
| Tray Width | Width of the tray in mm (used for the pointer) | |
| Tray Depth | Depth of the tray in mm (used for the pointer) | |
| Tray Tilt Angle | 0-30 | This is the angle in degrees for tilted trays. |
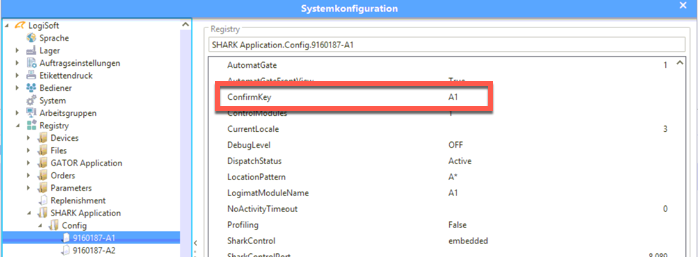
The SLL configuration menu actually changes parameters in the “registry”, here all configure parameters can be found, but it will typical not be needed to configure at this level.
Low level configuration of the Logimat SLL.
Step 6 – Check the Logimat is working from LogiSoft#
First restart LogiSoft after the Logimat has been configured.
Now the Logimat should be working. If everything is OK, it is just to start working. If not, check the connection by opening the Device Server window from the menu System Information -> Device Server in LogiSoft.
This will open the Device Server Window:
Look at the status for the module, here “A1”. If it says “Trays reported” the connection is working, it means that the Logimat has responded to a request for the tray configuration.
Check the "Visualization" interface for the PLC. Check that telegrams are going both directions. When LogiSoft starts it will send TT7030 and TT7034 to the PLC, they must be visible at the "Receiving port" column.
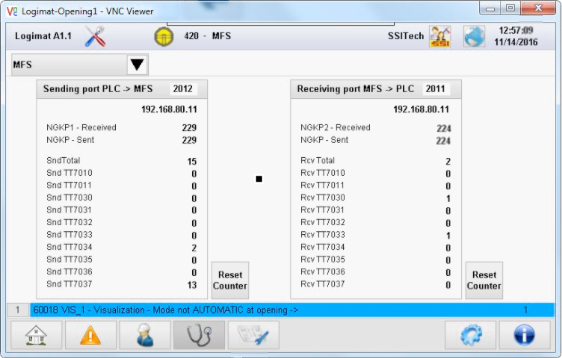
In response the PLC will send a number of TT7037 telegrams (one for each installed tray).
If the communication is not working, look at trouble shooting section.
Configuration of LogiWork#
With LogiWork the height of the tray in opening can be adjusted. It is in LogiSoft related to the operator, so each operator may have individual height.
LogiSoft needs to have the lower lift height specified to work probably. This is the distance in mm from the floor to the first (lowest) tray support. The typical value is 750 (mm). It can be set in the configuration panel for the Logimat or in the Registry at Registry -> Devices -> Vertical Lifts -> name of the lift, set the parameters "LiftHeightMin_mm".
The LogiWork feature must also be be enabled in the Product Key!
Measure the distance from the tray support to the floor.
LogiTilt#
Tilt of trays are supported. The Tilt angle can be set for each Logimat. The following must be configured:
- The Product Key must have Tilt enabled.
- Tilt must be activated for the Logimat Driver (Tilt = true).
- Tilt angle. It can be set from 0 to 30 degrees. If the angle is set to "0", tilt is disabled.
If the tray will tilt or not must be set for the tray in the general module-tray configuration. So even tilt is enabled for the Logimat Driver, it must also be activated for the specific tray in SHARK.
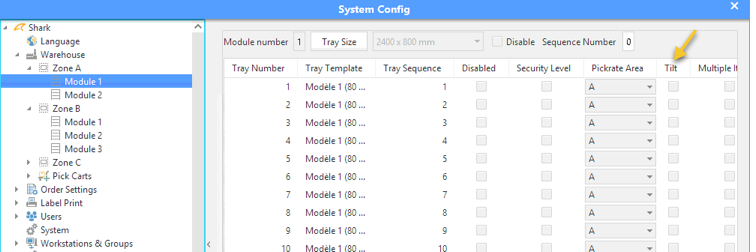
Tilt must be enabled for each tray. If the "tilt" column is not visible, it is probably due to a Product Key where Tilt is not activated.
LogiDual#
LogiDual is a feature that allows a tray to be fetched while another one is in the opening. It is fully supported by SHARK from build 1599.
The LogiDual mode can only be activated when the Logimat is idle. This means no trays in opening or elevator. This means that if SHARK is restarted with trays in the opening, the might be problems in changing the mode. The Logimat left the LogiDual mode, if SHARK is restarted.
This indicates that the Logimat has successfully entered LogiDual mode.
Configuration of the LogiDual mode:
1. A global flag, called UsePrefetch, must be enabled to support the LogiDual mode.
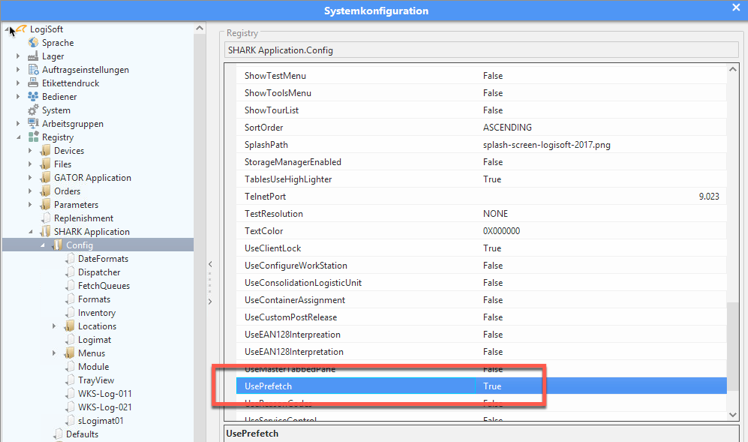
Setting the "prefetch" flag, makes the system generate a list of the next expected trays to come. The is used by the LogiDual feature to prefetch trays.
2. For each Logimat, the LogiDual mode must be enabled. It can be done by the Logimat SLL configuration panel or directly in the Registry|:
Devices->VerticalLifts->module name->LogiDual = true.
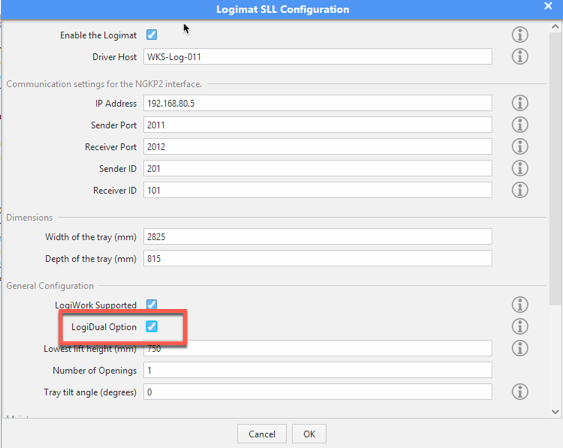
Setting the LogiDual mode from the Logimat SLL configuration panel.
How to test LogiDual#
It is possible to check if Shark Control is able to fetch dual mode trays by a simple command that can be reach using the telnet interface or from the Device Server screen.
The command is called "Dual \<tray>, \<next tray>
For example:

This will fetch tray 3 and tray 4 as dual mode tray from the Logimat called "011".
LogiDrive#
Must be enabled in the SLL configuration panel. In SHARK it is now available as the "Stub" functionality.
It will never extract the tray immediately, but will bring the tray to the opening and a second step has to be activated to extract the tray.
The tray is inserted again, on the tray return command.
LogiBar - The Confirmation Bar#
The confirmation bar is a light bar below the opening that can be used for pick confirmation instead of scanning a barcode or acknowledge on the screen. The feature is always enabled in Shark, but to make it work:
-
It must be activated in the Logimat. (PLC: Config -> Options -> Enable LogiBar for the right opening.)
-
Shark must be configured to accept "anything" as confirmation. So when using this feature is it not possible to use barcodes for checking the transaction.
-
Specify the name of the Logimat that will generate the confirmation. This is important because SHARK only will accept confirmation from the specified Logimat. This is required to avoid fake confirmations from other Logimats.
Delayed return of Trays#
There is a configuration parameter "TrayReturnDelayMS" that set a delay from the tray is requested to be returned, to the movement actually starts. This is usefull if the touch monitor is used for confirmation, this is placed behind the light curtain and if the operator is not quick enough, the movement may start before the arm is out of the light curtain, which means an emergency stop. The value is set in milliseconds, a typical value is 2000 for a 2 seconds delay.
LogiPointer Configuration#
The only required setup for this is the dimension of the tray. The calibration is done in the PLC.
There are 5 parameters to set.
| Parameter | Value | Description |
|---|---|---|
| TrayWidth_mm | Integer | Width (inner measure) of the tray in mm. Typical value is "4000". |
| TrayDepth_mm | Integer | Depth (inner measure) of the tray in mm. Typical value is "820". |
| LightSetBeforeTray | Boolean true/false | If true the pointer will be set before the tray arrives in the opening. Default is false. |
| LightSetAfterTray | Boolean true/false | If true the pointer will be set after the tray arrives in the opening. Default is true. |
| PointerUseActuallyTrayHeight | true/false | For goods with a certain height in combination with small locations, it can be difficult to point correctly to the goods, due to the angle of the pointer (especially in the back). If enabled this will correct the pointer according to the measured height of the goods. If false the defined tray height will be used. |
The reason for the LightSetBeforeTray/After is that the PLC will not accept the pointer to be set before the tray is on place. The parameters allows this behavioir to be changed, if the PLC firmware is updated in the future (the avoid waiting for the pointer).
Multiple Openings#
Multiple openings are supported.
Because the Logimat only can be controlled from one PC, a master/slave configuration has to be configured. In general it works like:
- Configure SHARK in the PC for opening 1 as a standard configuration, where this PC is controlling the Logimat (Shark Control is embedded).
- Configure the SHARK PC for opening 2, so it will use the same "Shark Control" as opening 1. So basically opening 2 is requesting trays through the PC for opening 1.
More openings than 2 are also supported, but they willl all use the PC for opening 1 as master.
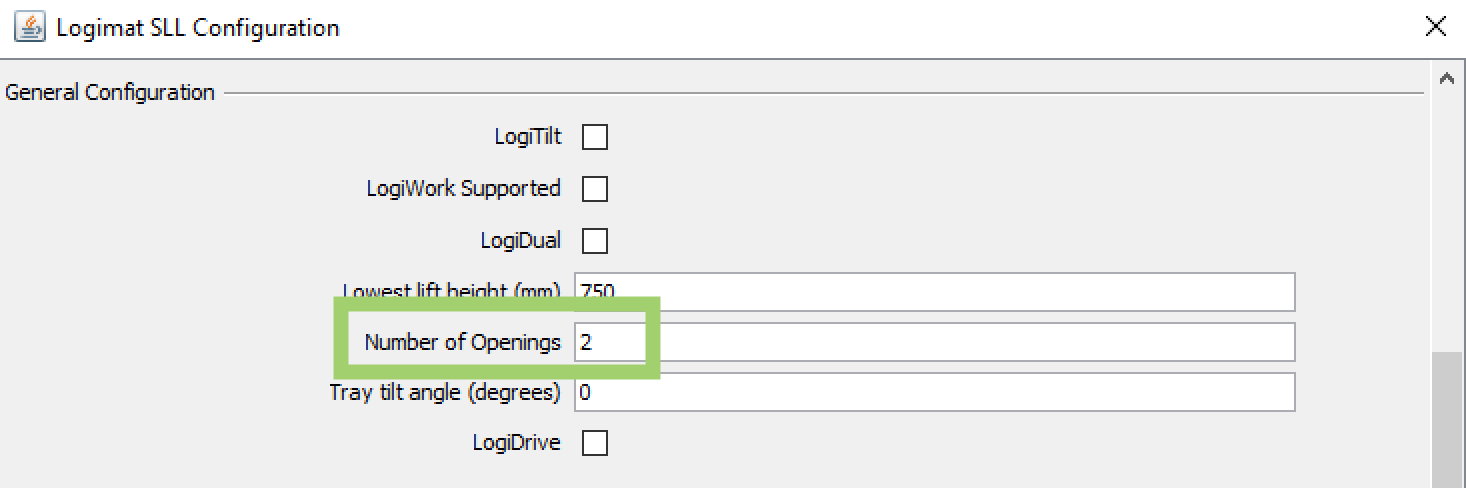
The number of openings must be set in the configuration and match the physical machine.
Possible conflicts with multiple openings.#
Since the multiple openings are sharing the same trays and lift, there are some obvious risk of conflicts if the openings are used in parallel.
The default behaviour, in case the same tray is requested to 2 or more different openings, is that an error will be generated for the second request.
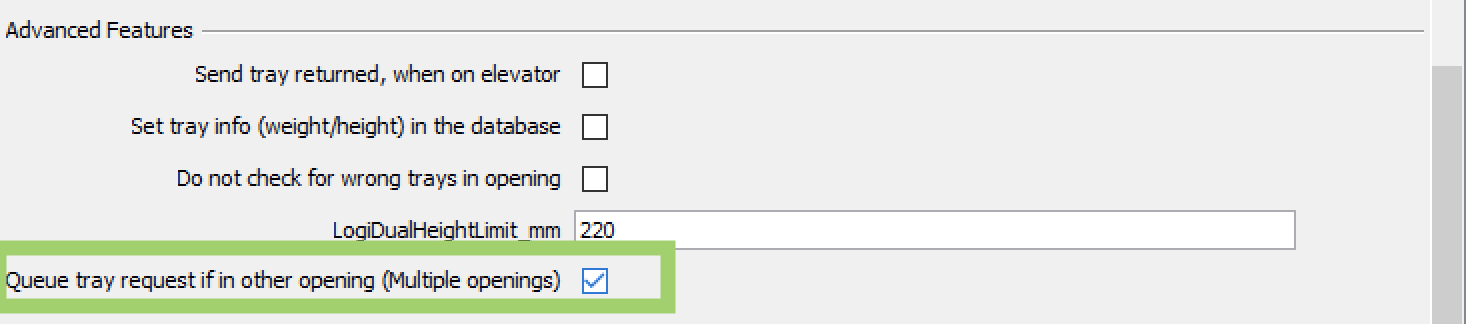
There is support for a mode, where the second request will be queued until the tray is returned from the first opening. No error will be generated in case the requested tray is unavailable. There is a possible dead-lock risk in this mode.
Control of Light in the Opening#
There is no standard support for turning on/off the light in the Logimat opening, but it is supported by the driver and can be implemented by client scripting. Typical use is to turn on the light in the active opening and turn it off in the others.
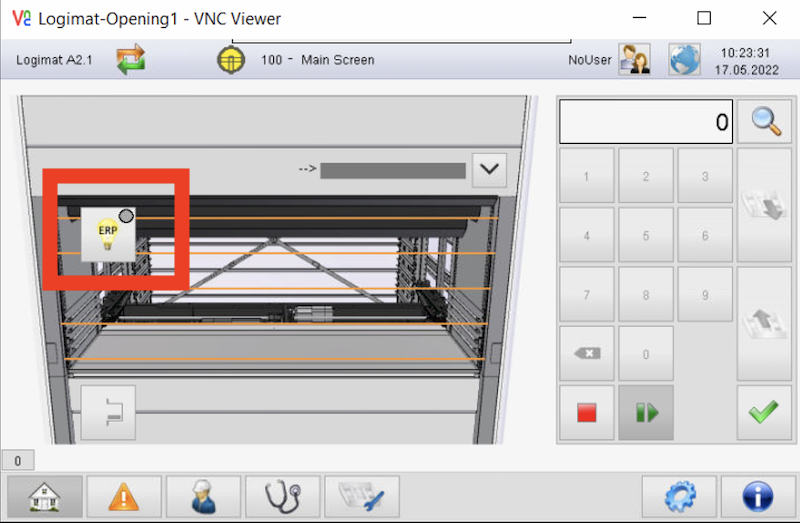
*To allow SHARK to control the light, please change the mode for the "bulb" on VNC Viewer for the PLC.
External Control of the Logimat#
There is an optional possibility to perform low level control of the Logimat by using the Web Service interface to Shark Control. The Web Service is a RESTful implementation.
Where Sharks works at a high level with article numbers, location address, etc. the low level interface support control at tray level with basic features like:
- Retrieve a tray.
- Get status. Controlling tray height changes.
The Web Service interface must be enabled to make it available. It is done in the Shark Registry under Registry->Shark Control->Web Server.
The default port number is 8095, but this can be changed in the configuration.
Communication between an external system and Shark/Logimat for low level control.
Configuration of the Web Service Port in Shark.
Most of the commands, requires a module name to identify the Logimat. This is due to the fact, that one PC may control more than one Logimats.
The Web Interface can be easily testet by using a standard Web Browser. If it is not possible to access Shark from an external PC, please check the Windows Firewall that might block for external access.

The response can be seen in the browser window.
The response is XML formattet and relative simple to interprete.
REST Commands#
The following commands are supported.
/command/logimat/\<Module>/gettray#
Move a tray to the gate. If there already is a tray at the gate, this will be returned first.
The call will return immediately, to get status and information about when the tray will be ready, use the «statusxml» command to poll for current status.
Command: http://
Parameters
traynumber=<tray>
tilt = true/false (optional, default false)
gate=1/2/3/4 (Opening number) (optional, defalt 1)
lightxpos*=<0.0 .. 1.0> (optional)
ightypos=<0.0 .. 1.0> (optional)
Response
<SharkControl>
<Status>OK|Error</Status>
<ErrorCode>error code</ErrorCode>
<Message>error message</Message>
</SharkControl>
Example
To get tray 3:
http://localhost:8095/command/logimat/a1/gettray?traynumber=3
To get tray 3 with tilt:
http://localhost:8095/command/logimat/a1/gettray?traynumber=3&Tilt=1
To get tray 3 from opening 2:
http://localhost:8095/command/logimat/a1/gettray?traynumber=3&Gate=2
Procedure to get a tray with support for changed height:
Use: "/command/logimat/\<Module>/gettray" to get the tray. Use: "/query/logimat/\<Module>/statusxml" to read the status from the Logimat. While the Logimat is working, it is busy and will return state=Busy. Poll the status until state is "OK" og "ERROR".
/command/logimat/\<Module>/returntray#
Return the current tray at gate.
If the height is changed, the tray will not be returned, but will generate an error. To automatically accept a changed height, add the "accept=true" parameter to the command.
Command: http://
Parameters
|gate=1|2|3|4 (Opening number)
Response
<SharkControl>
<Status>OK|Error</Status>
<ErrorCode>error code</ErrorCode>
<Message>error message</Message>
</SharkControl>
Example
Return the current tray in the opening:
http://localhost:8095/command/logimat/a1/returntray
Return the current tray from opening 2:
http://localhost:8095/command/logimat/a1/returntray?Gate=2
/command/logimat/\<Module>/returntrayacceptheight#
Return the current tray at gate. If the height is changed it will be accepted immediately.
Command: http://
Response
<SharkControl>
<Status>OK|Error</Status>
<ErrorCode>error code</ErrorCode>
<Message>error message</Message>
</SharkControl>
Example
Return the current tray at gate:
http://localhost:8095/command/logimat/a1/returntray
http://localhost:8095/command/logimat/a1/returntrayacceptheight
/query/logimat/\<Module>/statusxml#
Returns the current automat status formatted as XML.
It Can be used to detect if the Logimat is busy working, ready for the next operation or in an error state.
Command: http://
Response
<SharkControl>
<Status>OK|Error</Status>
<ErrorCode>error code</ErrorCode>
<Message>Error message</Message>
<Response>
<State>state</State>
<Text>status text</Text>
</Response>
</SharkControl>
Example Get status for automat A1:
http://localhost:8095/query/logimat/a1/statusxml
Status: Is OK when the command is accepted.
State: Is the current state of the Logimat, it can be READY, BUSY, ERROR, NOT_READY or MANUAL. MANUAL means the Logimat is put into manual control by the operator and cannot be remotely controlled, NOT_READY means that the Logimat is not connected or it has not been possible to read the configuration from the Logimat.
Text: Is a textual description of the current state and optional an error message.
/command/logimat/\<Module>/light/go#
Set the location light to a specific position in the tray as a floating number between 0 and 1.
Some positions:
| Tray Position | XPos | Ypos |
|---|---|---|
| Lower left corner | 0.0 | 0.0 |
| Upper left corner | 0.0 | 1.0 |
| Upper right corner | 1.0 | 0.1 |
| Center | 0.5 | 0.5 |
Command
Opening 1:
http://<host>:<port>/command/logimat/\<Module\>/light/go
Opening 2:
http://<host>:<port>/command/logimat/\<Module\>/light2/go
Parameters
xpos=<0.0 .. 1.0>
ypos=<0.0 .. 1.0>
tilt=true|false
Response
<SharkControl>
<Status>OK|Error</Status>
<ErrorCode>error code</ErrorCode>
<Message>error message</Message>
</SharkControl>
Examples
Set the light to the middle of the tray (0.5,0.5) :
http://localhost:8095/command/logimat/a1/light/go?xpos=0.5&ypos=0.5
http://localhost:8095/command/logimat/a1/light/go?xpos=0.5&ypos=0.5&tilt=true
/command/logimat/\<Module>/lift?Height=\<height>#
Set the height of the optional lift.
The lift cannot work with a tray in the opening or when the Logimat is operating.
Command: http://
Parameters
height=<0.8 .. 1.0> The height of the lift in meters
Response
<SharkControl>
<Status>OK|Error</Status>
<ErrorCode>error code</ErrorCode>
<Message>error message</Message>
</SharkControl>
Example
Set the lift height to 0.9 meter:
http://localhost:8095/command/logimat/a1/lift?height=0.9
/command/logimat/\<Module>/reseterror#
This will reset a possible PLC error.
Command: http://
Response
<SharkControl>
<Status>OK|Error</Status>
<ErrorCode>error code</ErrorCode>
<Message>error message</Message>
</SharkControl>
Example
Reset an error condition:
http://localhost:8095/command/logimat/a1/reseterror
Error Codes#
The following error codes may be returned.
| Error Code | Description |
| 1 | OK |
| 1000 | Syntax error |
| 1018 | General error code. Will for example be returned due to an unknown REST command. This can happen during initialization, before the Logimat module is started. |
| 1028 | Not yet initialized. |
| 1203 | Automat is in manual mode. |
| 1204 | Goods height is exceeded. |
| 1235 | Goods height has changed. This means that the tray will not be returned until the change of height has been accepted. |
Command Interface#
The Telnet Interface to Shark Control supports low level control of the Logimat for debugging. The commands can also be used in scripting and for simple file control of a SHARK WCS Driver solution.
Some convenient commands are (the examples is if the module is called A1):
Get a list of all trays:
LOGIMAT:A1:TRAY:LIST?
Get information about a specific position:
LOGIMAT:A1:TRAY:POSITION? \<position number\>
Returns: \<position>,\<tray>,\<height in mm>
Set a specific position:
LOGIMAT:A1:TRAY:POSITION \<position\>,\<tray\>,\<height in mm\>
Commands#
This is a list of all available commands.
ARRIVALTIME?#
Returns the absolute time in ms when the tray is expected in the gate
AUTOCONFIG#
BUSY?#
DEBUG#
Enable/disable debug output
| Parameter | Type | Default | Description |
|---|---|---|---|
| Function | STR | ALL | Available flags: ALL/DETAILS/EVENTS/BOXTRACE/TELEGRAMS/STATUSLOOP/REGISTERACCESS/COMMANDS |
| Mode | BOOLEAN | yes | If true debug messages will be printed to standard output |
DEBUG?#
DEFAULTGATE#
The default gate used in GetTray commands. Mainly used for debugging
| Parameter | Type | Default | Description |
|---|---|---|---|
| GateNumber | INTEGER | 1 | Default gate number (1-4) |
DEFAULTGATE?#
Get the default gate used in GetTray commands
DELAY#
Set the simulation delay parameters
| Parameter | Type | Default | Description |
|---|---|---|---|
| delay1 | FLOAT | 500 | Delay 1 - Time for the horizontal movement [ms] |
| delay2 | FLOAT | 100 | Delay 2 - Time used for each tray position [ms] |
DIALOG#
Start a dialog on the control panel
| Parameter | Type | Default | Description |
|---|---|---|---|
| Gate | INTEGER | 1 | Opening number |
| OrderNumber | STR | Order Number to display | |
| Article | STR | Article Number to display | |
| Qty | STR | Quantity to display | |
| Note | STR | Note to display |
FETCH#
Get a tray to the gate
| Parameter | Type | Default | Description |
|---|---|---|---|
| Carrier | INTEGER | Tray number | |
| ID | STR | User supplied ID | |
| Tilt | BOOLEAN | off | Enable/disable tilt of tray |
| TrayHeight | FLOAT | 0.0 | Height of tray |
| Pointer_X | FLOAT | 0 | X Location 0 -1 |
| Pointer_Y | FLOAT | 0 | Y Location 0 -1 |
| LightXWidth | FLOAT | 0 | X Width Location 0 -1 |
| LightYDepth | FLOAT | 0 | Y Width Location 0 -1 |
| Next | STR | Next tray expected to following current tray | |
| Opening | INTEGER | 0 | Gate (1-4) used for current operation |
| Text1 | STR | Text to display | |
| Text2 | STR | Text to display | |
| Text3 | STR | Text to display | |
| Text4 | STR | Text to display |
GETTRAY#
Get a tray to the opening. Will automatically return the previous tray, if that still is in the opening.
| Parameter | Type | Default | Description |
|---|---|---|---|
| TrayNumber | INTEGER | Tray number | |
| ID | STR | User supplied ID (will be returned in the tray-at-gate event) | |
| Tilt | BOOLEAN | off | Enable/disable tilt of tray |
| TrayHeight | FLOAT | 0.0 | Height of tray (used for pointer calibration) |
| LightXPos | FLOAT | 0 | X Location 0.0 - 1.0 (lower left is ref, value in % of tray width) |
| LightYPos | FLOAT | 0 | Y Location 0.0 - 1.0 (lower left is ref, value in % of tray depth) |
| LightXWidth | FLOAT | 0 | X Width Location 0.0 - 1.0 (Width of the location in % |
| LightYDepth | FLOAT | 0 | Y Width Location 0.0 - 1.0 (Depth of the location in % |
| NextTray | STR | Next tray expected to following current tray | |
| Gate | INTEGER | 0 | Gate or opening number(1-4) for the current operation |
| Text1 | STR | Text to display on PLC display line 1 (if available) | |
| Text2 | STR | Text to display on PLC display line 2 (if available) | |
| Text3 | STR | Text to display on PLC display line 3(if available) | |
| Text4 | STR | Text to display on PLC display line 4(if available) |
Example#
Simple get tray 5: GetTray 5
Get tray with light pointer: GetTray 5,0,false,0,0.4,0.7
Get tray with tilt: GetTray 5,0,true
Get tray to opening 2: GetTray 5,0,false,,,,,,2
GETTRAY?#
Request the specified tray and returns the time when the tray is expected in the gate
| Parameter | Type | Default | Description |
|---|---|---|---|
| TrayNumber | INTEGER | Tray number | |
| ID | STR | User supplied ID | |
| Location | STR | Shark location address |
GT#
Simple get for turbo trays (convenient command for testing)
| Parameter | Type | Default | Description |
|---|---|---|---|
| Tray | INTEGER | 0 | |
| TurboTray | INTEGER | 0 |
HELP?#
| Parameter | Type | Default | Description |
|---|---|---|---|
| Command | STR | Command name |
HELPHTML?#
| Parameter | Type | Default | Description |
|---|---|---|---|
| Filename | STR | /users/sos/tmp/helphtml.htm | help.html |
HELPMARKDOWN?#
| Parameter | Type | Default | Description |
|---|---|---|---|
| Filename | STR | /users/sos/tmp/helpmarkdown.md | help.md |
INIT#
Initilize the automat connection
| Parameter | Type | Default | Description |
|---|---|---|---|
| Port | STR | The port used to connect to the Automat | |
| Address | STR | Automat address on the PLC network |
LIFT#
Set the lift
| Parameter | Type | Default | Description |
|---|---|---|---|
| Height | FLOAT | 1.0 | Lift height in meter |
| Gate | INTEGER | 0 | The gate that will be used |
LIFT?#
Set the lift
| Parameter | Type | Default | Description |
|---|---|---|---|
| Gate | INTEGER | 0 | Gate number to get lift height off |
LOADREG#
Load setup from the Shark Registry
REGISTEREVENTHANDLER#
REGISTRYKEY#
Set a registry value. The key must already exists
| Parameter | Type | Default | Description |
|---|---|---|---|
| Key | STR | Registry key | |
| Value | STR | Value |
REGISTRYKEY?#
Read a registry value
| Parameter | Type | Default | Description |
|---|---|---|---|
| Key | STR | Registry key |
REGISTRYRELOAD#
Load the registry for the module
REGISTRYROOT?#
Returns the root path to the registry for this module
REGMONITOR#
Setup up a monitor that will read PLC registers continously and send the result as an event when data is changed
| Parameter | Type | Default | Description |
|---|---|---|---|
| Register | STR | Start register to monitor | |
| Length | INTEGER | 1 | Lenght of number block |
| Interval | INTEGER | 1000 | Interval in ms to monitor |
| RepeatCount | INTEGER | 1 | Number of times to repeat |
REPORT?#
Returns a module specific status report
RESETERROR#
| Parameter | Type | Default | Description |
|---|---|---|---|
| Mode | STR | NORMAL | NORMAL/ALL |
RESTART#
Reset the module to the original state
RETURNTRAY#
| Parameter | Type | Default | Description |
|---|---|---|---|
| ReturnPos | INTEGER | 0 | Return to other position |
| Gate | INTEGER | 0 | The gate number from where the tray is returned |
SAVEREG#
Save current setup to the Shark Registry
SETWEIGHT#
Update the database with the tray weight after returned
| Parameter | Type | Default | Description |
|---|---|---|---|
| Weight | FLOAT | 0.0 | Set the weight to report (kg) |
STATE?#
| Parameter | Type | Default | Description |
|---|---|---|---|
| Opening | INTEGER | 1 | Opening number |
STATUS:DEBUG#
Enable/disable debug output
| Parameter | Type | Default | Description |
|---|---|---|---|
| Function | STR | ALL | Available flags: ALL/DETAILS/EVENTS/BOXTRACE/TELEGRAMS/STATUSLOOP/REGISTERACCESS/COMMANDS |
| Mode | BOOLEAN | yes | If true debug messages will be printed to standard output |
STATUS:DEBUG?#
STATUS:ERROR?#
STATUS:HELP?#
| Parameter | Type | Default | Description |
|---|---|---|---|
| Command | STR | Command name |
STATUS:HELPHTML?#
| Parameter | Type | Default | Description |
|---|---|---|---|
| Filename | STR | /users/sos/tmp/helphtml.htm | help.html |
STATUS:HELPMARKDOWN?#
| Parameter | Type | Default | Description |
|---|---|---|---|
| Filename | STR | /users/sos/tmp/helpmarkdown.md | help.md |
STATUS:LOADREG#
Load setup from the Shark Registry
STATUS:REGISTEREVENTHANDLER#
STATUS:REGISTRYKEY#
Set a registry value. The key must already exists
| Parameter | Type | Default | Description |
|---|---|---|---|
| Key | STR | Registry key | |
| Value | STR | Value |
STATUS:REGISTRYKEY?#
Read a registry value
| Parameter | Type | Default | Description |
|---|---|---|---|
| Key | STR | Registry key |
STATUS:REGISTRYRELOAD#
Load the registry for the module
STATUS:REGISTRYROOT?#
Returns the root path to the registry for this module
STATUS:REPORT?#
Returns a module specific status report
STATUS:RESET#
STATUS:RESTART#
Reset the module to the original state
STATUS:SAVEREG#
Save current setup to the Shark Registry
STATUS:STATUS?#
Returns the current status for the module
STATUS?#
Returns the current status for the module
STORE#
| Parameter | Type | Default | Description |
|---|---|---|---|
| ReturnPos | INTEGER | 0 | Return to other position |
| opening | INTEGER | 0 | The gate number from where the tray is returned |
TILTSUPPORTED#
Define if the automat supports tray tilt
| Parameter | Type | Default | Description |
|---|---|---|---|
| Supported | BOOLEAN | false | If true tray tilt is supported |
TILTSUPPORTED?#
Returns if the automat supports tray tilt
TRAY:ADD#
Add a tray to the Shark configuration (does not make any changes in the lift)
| Parameter | Type | Default | Description |
|---|---|---|---|
| TrayNumber | INTEGER | Tray number to add | |
| Position | INTEGER | Position of the tray | |
| Height | INTEGER | Height of the tray in mm |
TRAY:ADDGROUP#
Adds a serie of trays, mainly for debugging
| Parameter | Type | Default | Description |
|---|---|---|---|
| FromTrayNumber | INTEGER | First tray to add | |
| ToTrayNumber | INTEGER | Last tray to add |
TRAY:CHECK?#
Check for consistency tray table
| Parameter | Type | Default | Description |
|---|---|---|---|
| Clearance | INTEGER | 0 | Needed clearance |
TRAY:CONFIG?#
Get the configuration for the specified tray (tray height in mm, position number
| Parameter | Type | Default | Description |
|---|---|---|---|
| TrayNumber | INTEGER | 0 | Tray number to get info about, If empty all trays are returned |
TRAY:INFO?#
Returns info about the selected logical tray: position, tray, tray_heigh, back, distance, pos_height
| Parameter | Type | Default | Description |
|---|---|---|---|
| tray | INTEGER | 0 | Logical Tray Number (empty shows all) |
TRAY:LIST?#
Return a list of all trays for the lift
TRAY:LOADTRAYCONFIG#
Load the current tray configuraiton from a file
| Parameter | Type | Default | Description |
|---|---|---|---|
| Filename | STR | /users/sos/tmp/trayconfig.txt | Name of file |
TRAY:LOCK#
Lock a trays position
| Parameter | Type | Default | Description |
|---|---|---|---|
| Tray | INTEGER | 0 | Tray number to lock |
| Locked | BOOLEAN | true | true/false flag lock or unlock tray |
TRAY:POSITION#
Set info for the specified position
| Parameter | Type | Default | Description |
|---|---|---|---|
| position | INTEGER | 0 | Position |
| tray | INTEGER | 0 | Tray Number |
| posheight | INTEGER | -1 | Height in mm of the position |
| tray_height | INTEGER | -1 | Height in mm of the tray if present |
| back | INTEGER | -1 | 0=Front, 1=Back |
| type | INTEGER | -1 | 1=Tray |
| distance | INTEGER | -1 | Encoder value |
TRAY:POSITION?#
Returns info about the selected position: tray, heigh, back, distance, type
| Parameter | Type | Default | Description |
|---|---|---|---|
| position | INTEGER | Position Number |
TRAY:REMOVE#
Remove a tray from SHARK's configuration
| Parameter | Type | Default | Description |
|---|---|---|---|
| TrayNumber | INTEGER | Tray number to add |
TRAY:REMOVEALL#
Remove all trays from Sharks configuration
TRAY:REPORT?#
Returns a module specific status report
TRAY:SAVETRAYCONFIG#
Save the current tray configuraiton to a file
| Parameter | Type | Default | Description |
|---|---|---|---|
| Filename | STR | trayconfig.txt | Name of file |
| Mode | STR | Full | Normal / Full / Restore |
TRAY:STATISTIC?#
Returns statistic information about fragmentation free (m), largest (m), % free, total used (m), total free (m), number of trays
TRAY:STATUS?#
Returns the current status for the module
TRAY?#
| Parameter | Type | Default | Description |
|---|---|---|---|
| Gate | INTEGER | 0 | The gate number from where the tray is returned |
TRAYACCEPT#
Accept the current tray height
| Parameter | Type | Default | Description |
|---|---|---|---|
| accept | BOOLEAN | no | If true accept the current tray height |
| Gate | INTEGER | 1 | Gate number |
TURBOSUPPORTED#
Define if the automat supports turbo mode
| Parameter | Type | Default | Description |
|---|---|---|---|
| Supported | BOOLEAN | false | If true turbo is supported |
TURBOSUPPORTED?#
Returns if the automat supports turbo mode
USERTEXT?#
Return a list of user text strings
Trouble Shooting#
Communication Problems#
The communication is via the NGKP2 protocol. It requires 2 sockets and both must be working. If there are no response from the other side, the connection will be closed after 30 seconds.
In the PLC visualization, the connection from LogiSoft can be viewed.
Check the IP address is correct for both ports, it must be the IP address of LogiSoft.
Check telegrams are updated. Even when the system is idle there are keep alive telegrams every 10 seconds. They will not be displayed as TT.. telegrams, but is counted in "NGKP received/sent".
The IP address of the connected LogiSoft is here 192.168.80.11.
LogiSoft has the possibility to log all telegrams between the PLC and LogiSoft. This can be configured in the Logimat configuration by:
- Setting the TelegramLogFolder to a valid folder.
- Setting TelegramLogLevel to Normal.
This will generate a log file for each day. It will automatically delete files older than 2 weeks.
Simulation Mode#
A simulation mode is available where the physical Logimat is simulated. The purpose is not make a 100% simulation, but to test an installation before the physical automats are available. It can also be used with Shark installations used for testing.
To use the simulation mode, set the Shark Control device type to "AutomatSimulate".
The simulator needs some knowledge about the possible
configuration of the automat. Normally this information will be
retrieved from the PLC in the machine, but when the machine is not
available the information is needed somehow else. Shark Control allows
the configution to be read from a file. Which file is specified in the
Shark Registry.
The parameter is named "LoadTrayConfigFile". The file is a text file that can be generated from a real installation, using the Shark Control command:
Logimat:A1:Tray:SaveTrayConfig \<filename\>
(replace "A1" by the module name)
Installing VNC Server for Remote Access#
If the Logimats PCs have no Internet connection, a possible way to get external access is from a local pc or server and use VNC. This is a guide for configuring the Logimat firewall for VNC.
Step 1
Create a packet filter.
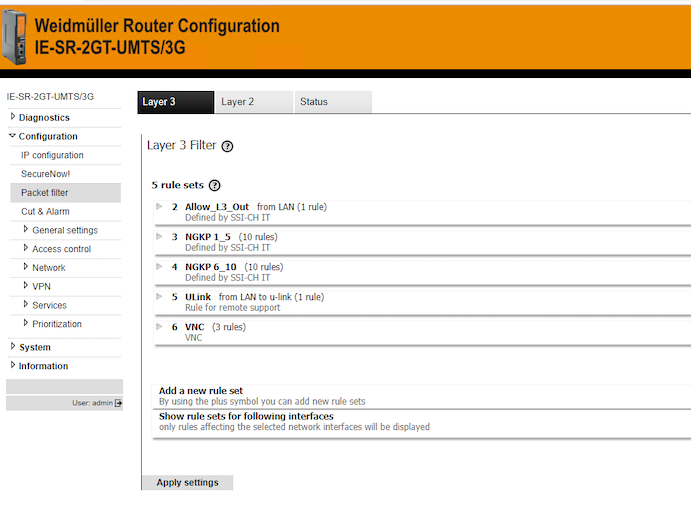
- Press "Add a new rule set".
- Name the new rule set "VNC".
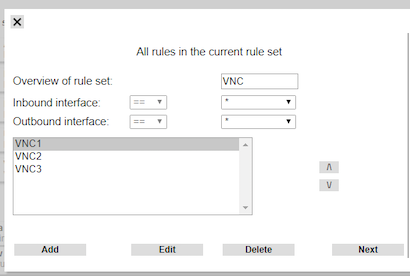
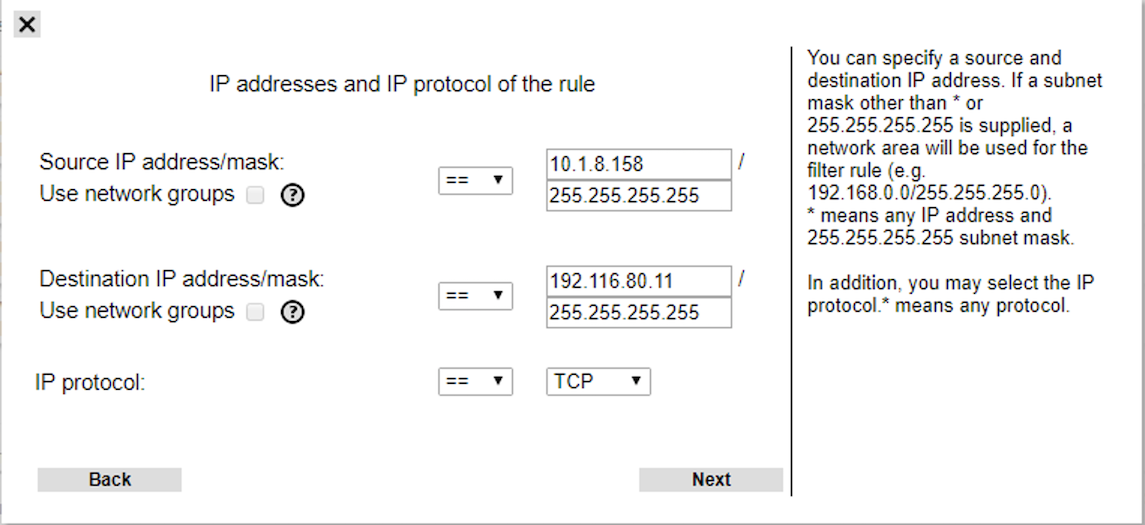
- Add a new rule.
- Set source IP to the SHARK Application Server (or from where the VNC client is running).
- Set mask to 255.255.255.255
- Set Destination IP to the IP of the Logimat PC.
- Protocol to "TCP"
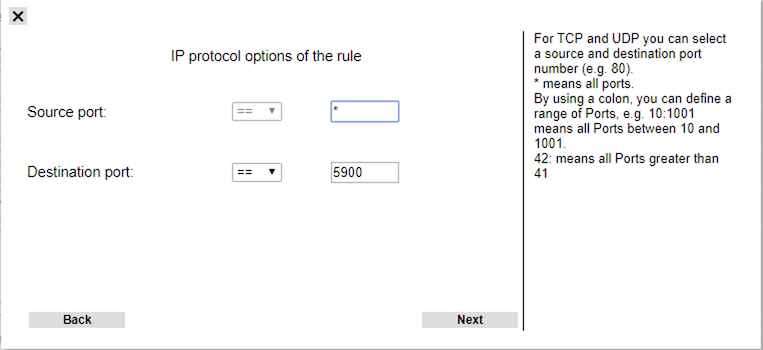
- Press "Next"
- Set Source Port to "*"
- Set Destination Port to "5900"
- Press "Next"
- Set source port to "*"
- Set destination port to "5900"
- Press "Apply"
Step 2
Define a forward rule.
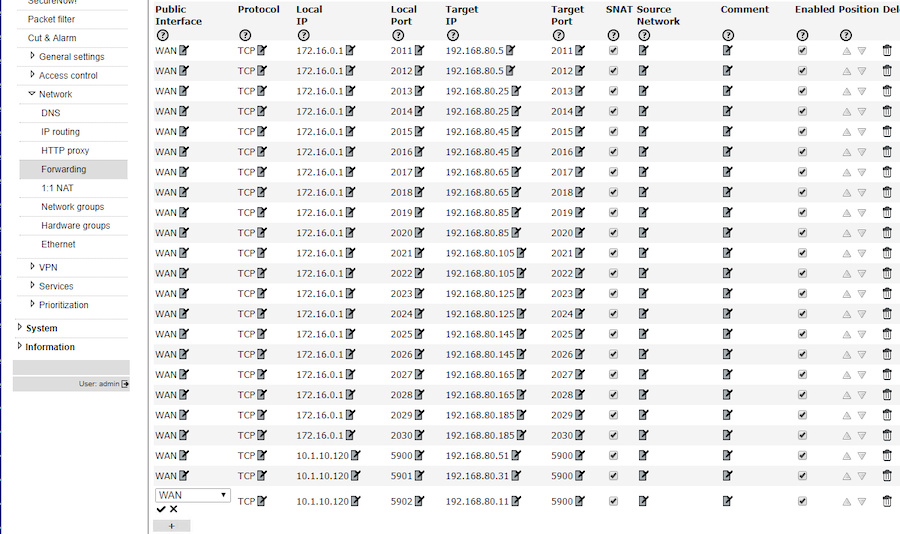
- Press "+" to add a new forwarder.
- Set the local IP to the firewall WAN IP.
- Set the local port to the external port used to access VNC (VNC default is 5900, but because more than one VNC server can be used, there must be mapped from another port, for example 5901, 5902, etc.)
- Target IP is the IP of the Logimat PC.
- Target Port is "5900".
- Repeat from 3. until all Logimats are included.
- Press "Apply"
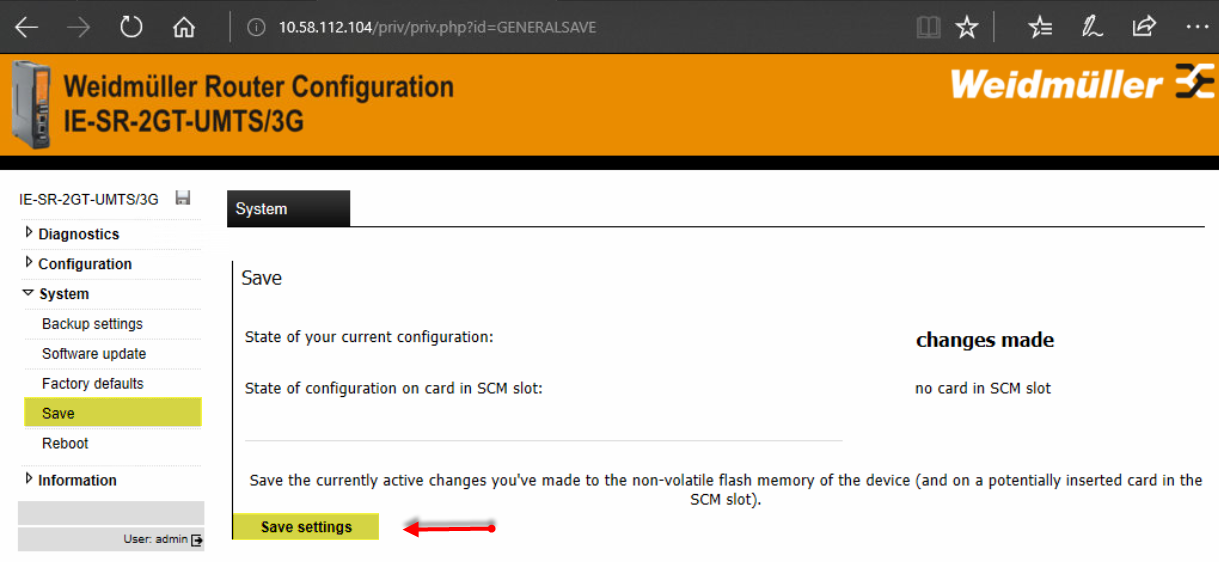
Step 3
Save and Reboot the firewall.
{% if site.development %}
Telegram flow#
@startuml
title Telegram Flow
==Get Tray==
SHARK_CLIENT -> SHARK_WCS : GetTray
SHARK_WCS -> PLC : TT7010 - Request tray
SHARK_WCS -> PLC : TT7032 - Set pointerr
PLC -> SHARK_WCS : TT7011 (ackCode=2) - Tray requested
PLC -> SHARK_WCS : TT7011 (ackCode=1) - Tray at opening
SHARK_WCS -> SHARK_CLIENT : TrayAtGate
==Get Tray - with tray in opening==
SHARK_CLIENT -> SHARK_WCS : GetTray
SHARK_WCS -> PLC : TT7010 (OrderCode=11, opening=0) - Return current tray in opening
PLC -> SHARK_WCS : TT7011 (OrderCode=11, ackCode=2) - Tray return started
PLC -> SHARK_WCS : TT7011 (OrderCode=11, ackCode=1) - Tray returned
SHARK_WCS -> PLC : TT7010 - Request tray
PLC -> SHARK_WCS : TT7011 (ackCode=2) - Tray requested
PLC -> SHARK_WCS : TT7011 (ackCode=1) - Tray at opening
SHARK_WCS -> SHARK_CLIENT : TrayAtGate
@enduml
{% endif %}